PLC仿真系统说明
一、仿真系统PLC控制部分硬件及功能介绍
1、控制台面板组成部分分布如下图示1-1:
① 电源开关及供电插头
② 220V、24V电源供电指示
③ 24V供电端口
④ PLC供电开关
⑤ 以太网通讯接口
⑥ S7-1200PLC控制器及SM1223扩展模块
⑦ 模拟量输入端口
⑧ S7-1200PLC输入端口
⑨ S7-1200PLC输出端口
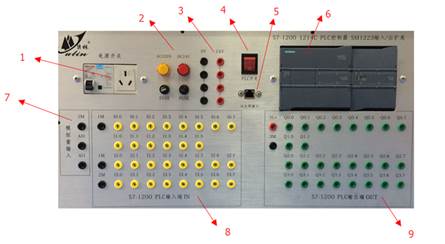
图示1-1
2、控制台可移动控制面板组成部分部件分布如下图示1-2:
① 控制输入接口
② 控制按钮、旋钮、拨码开关及急停按钮
③ 控制输出接口
④ 红色指示灯
⑤ 绿色指示灯
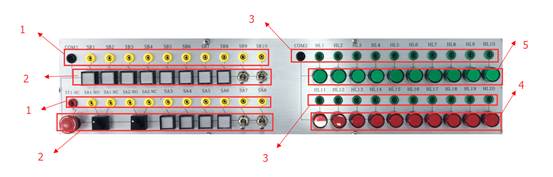
图示1-2
2、主要功能:
Ø 实现虚拟仿真系统单机操作控制,通过实际的硬件PLC来控制仿真系统场景的动作变化
Ø 拓展功能,学生可以根据现有的PLC控制平台来实现仿真系统以外的项目实施
二、仿真系统PLC控制部分操作步骤
1、仿真控制面板总电源供电,将如下图所示的空开上电

图示2-1
2、PLC电源供电,将如下图所示的开关打到ON状态

图示2-2
3、控制信号线连接,将控制台的面板信号端口与可移动控制面板的信号端口相连接,正确连接如下图所示,具体操作连线步骤如下如所示
| 序号 |
操作步骤 |
技术要点 |
图片示意 |
| 步骤1 |
将PLC的输入端口1M、2M、3M与0V相连接 |
切勿将PLC的输入公共端1M、2M与电源0V、24V混淆连接 |

|
| 步骤2 |
将PLC的输出端口3L+、3M分别与24V、0V相连接 |
切勿将PLC的输出电源3L+(24V)、3M(0V)与电源0V、24V混淆连接 |

|
| 步骤3 |
可移动控制面板输入公共端口COM1与24V相连接,输出公共端口COM2与0V相连接 |
可移动控制面板的输入输出公共端口切勿与控制面板的公共端口错误连接 |

|
| 步骤4 |
控制面板的输入信号与可移动控制面板输入信号对应相连接 |
可移动面板的输入信号可以与控制面板的PLC输入信号端口自定义连接,根据实际的I/O分配 |

|
| 步骤5 |
控制面板的输出信号与可移动控制面板输出信号对应相连接 |
可移动面板的输出信号可以与控制面板的PLC输出信号端口自定义连接,根据实际的I/O分配 |

|
| 步骤6 |
按照上述步骤正确连接,切勿错误操作 |
按照上述的原理,切勿将PLC输入输出混淆连接 |

|
4、PLC控制面板操作说明
仿真系统PLC控制部分有立体仓库、传输线1、传输线2、传输线3、机器人滑轨及装配站六个部分组成,操作步骤需要操作者根据实际的控制对象以及对应的线路连接方法来选择操作面板。每个控制面板的控制元件不同,对应实现的功能也不同。本系统的控制面板的输入按钮以及输出状态灯显示均是根据需要选用。具体操作步骤如下:
| 序号 |
控制站点 |
操作步骤 |
技术要点 |
| 1. |
立体仓库 |
按下SB1按钮自动复位立体仓库,按下SB2按钮停止运行,拍下急停按钮ST1紧急停止立体仓库运行 |
启动、停止、急停按钮以及输出信号需要与PLC的输入输出信号相一致,每个站点的实际程序与操作步骤不一样,所以操作者需要在操作前确认IO分配是否是自身所连线的方法一致,如果不一致需要根据IO数据表进行合理修改线路连接。按钮部分的操作也需要与程序相结合,输出输出与PLC程序一致时,操作者可操作设备。 |
| 2. |
传输线1 |
按下SB1按钮启动传输线1运行,按下SB2按钮停止运行,拍下急停按钮ST1紧急停止传输线1运行 |
| 3. |
传输线2 |
按下SB1按钮启动传输线2运行,按下SB2按钮停止运行,拍下急停按钮ST1紧急停止传输线2运行 |
| 4. |
传输线3 |
按下SB1按钮启动传输线3运行,按下SB2按钮停止运行,拍下急停按钮ST1紧急停止传输线3运行 |
| 5. |
机器人滑轨 |
按下SB1按钮自动复位机器人滑轨,按下SB2按钮停止运行,拍下急停按钮ST1紧急停止机器人滑轨运行 |
| 6. |
装配站 |
按下SB1按钮自动复位装配站,按下SB2按钮停止运行,拍下急停按钮ST1紧急停止装配站运行 |